XST-LiDARNet 原位生态激光雷达
产品简介

北京星视图科技有限公司自主研发的XST-LiDARNet原位生态激光雷达系统可以野外生态环境中持续性扫描目标区域、更精确反映植被动态、保持观测连续、时间分辨率可达到小时、数据原位观测,无需考虑点云几何位置配准问题、有效利用时序信息、准确捕捉植被生长变化。
软件系统
原始数据:二进制结构数据就是由一系列XYZ坐标信息组成的三维点云图;
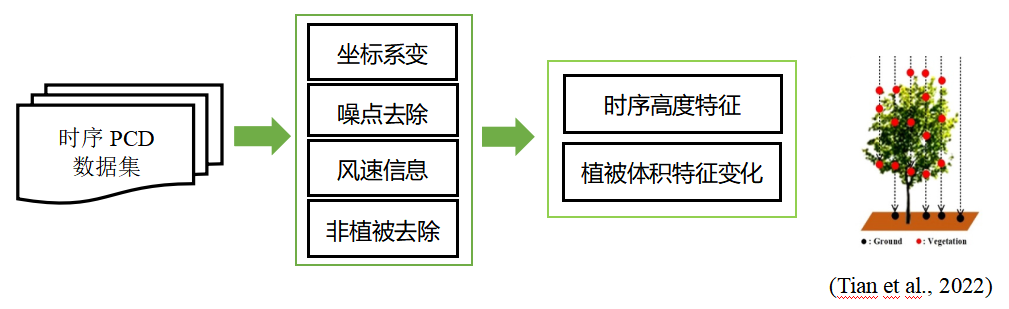
点云数据处理:三维坐标变换、噪声点去除、日内点云数据合成、点云地面滤波、风速滤波等过程,结合人为判断筛选(比如塔体、支架底座等,安装时一次性手动裁剪即可);
结构参数提取算法优化:最优栅格化冠层高度提取模型;基于体积表面差分,估算植被体积日变化,获取植被时序变化特征。
应用案例
激光雷达与物候相机组合,观测生长物候的同时,为点云数据计算验证提供参考

数据处理过程
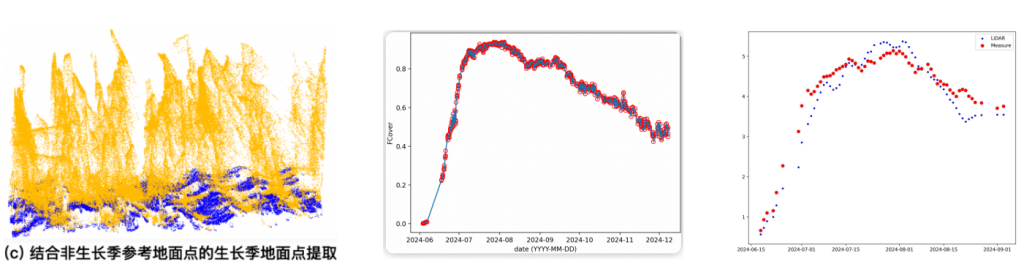
农作物与地面的点云分离–植被覆盖度计算(FVC)–间隙率计算–叶面积指数计算(LAI)。通过一个生长季的数据获取,LiDAR计算得到的叶面积指数与地面实测值时间序列规律非常一致(7天滑动平均)。
技术参数
| 激光波长 | 905nm |
| 人眼安全级别 | Class1(IEC60825-1:2014) |
| 测距量程(@100klx) | 150m @10%反射率;最小测距1米,建议3米以上 |
| 测距随机误差(1σ) | <2cm@20m(80%反射率) |
| 测距系统误差 | <±3cm@20m |
| 视场角 | 水平120°,竖直25° |
| 角度随机误差 | <0.1° |
| 点云输出 | 452000点/秒 |
| 工作环境温度 | -40℃~85℃ |
| 雷达防护级别 | IP66 |
| 运行功耗 | 额定12W;启动26W;最大低温加热功率40W;供电电压:9~18V |
| 数据处理软件 | 系统内置数据在线处理程序 |
| 可测参数 | 三维点云数据、冠层高度(平均高度和80%分位数高度)、植被面积、覆盖度、叶面积指数、树干胸径(横向安装)、叶倾角 |
| 工作模式 | 全天候全自动 |
| 无线传输 | 内置模块,支持双流量卡、热插拔,4G全网通 |
| 自带GPS | 记录位置海拔信息,校准系统时间 |