XST-LiDARNet Eco-lidar in situ
Produits

Le système LiDAR écologique in situ XST-LiDARNet, développé indépendamment par Beijing StarView Technology Co., Ltd. peut scanner en continu la zone cible dans l'environnement écologique du terrain, refléter plus précisément la dynamique de la végétation, maintenir la continuité de l'observation, avec une résolution temporelle allant jusqu'à l'heure, et les données peuvent être observées in situ sans tenir compte de l'alignement de la position géométrique du nuage de points, en utilisant efficacement les informations temporelles, et en capturant avec précision les changements de la croissance de la végétation.
système logiciel
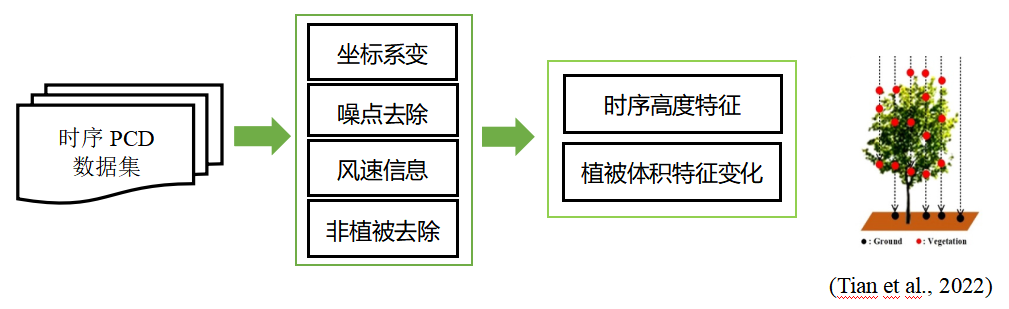
Données brutes :Les données structurées binaires sont des cartes de nuages de points 3D constituées d'une série d'informations de coordonnées XYZ ;
Traitement des données des nuages de points :Des processus tels que la transformation des coordonnées 3D, la suppression des points de bruit, la synthèse des données des nuages de points intrajournaliers, le filtrage des nuages de points au sol, le filtrage de la vitesse du vent, etc., combinés à un filtrage par jugement humain (par exemple, la tour, la base du support, etc. peuvent être coupées manuellement en une fois pendant l'installation) ;
Optimisation des algorithmes d'extraction des paramètres structurels :Modèle optimal d'extraction de la hauteur de la canopée à partir de données matricielles ; estimation des changements quotidiens du volume de la végétation sur la base de la différenciation volumétrique de la surface pour obtenir les caractéristiques des changements temporels de la végétation.
Cas d'application
La combinaison du LiDAR et d'une caméra météorologique fournit une référence pour le calcul et la validation des données du nuage de points tout en observant la croissance et les conditions météorologiques.

Traitement des données
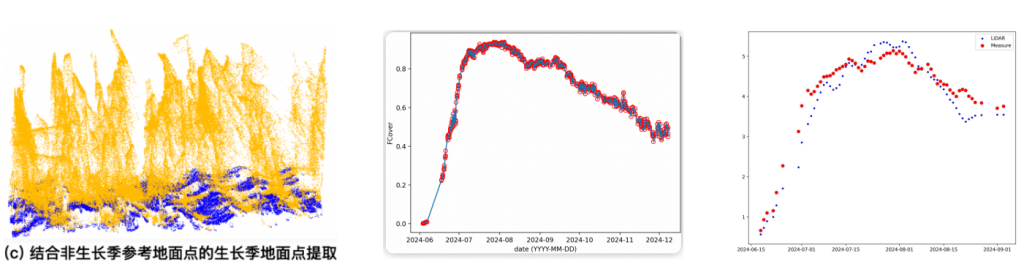
Séparation des cultures du sol par nuage de points - Calcul de la couverture végétale (FVC) - Calcul du taux d'espacement - Calcul de l'indice de surface foliaire (LAI). Avec des données acquises au cours d'une saison de croissance, l'indice de surface foliaire obtenu à partir des calculs LiDAR était très cohérent avec le modèle de série temporelle des valeurs de vérité au sol (moyenne glissante sur 7 jours).
Paramètres techniques
| longueur d'onde du laser | 905nm |
| niveau de sécurité pour les yeux humains | Classe 1 (IEC60825-1:2014) |
| Plage de mesure(@100klx) | 150m @10% reflectance ; portée minimale 1m, 3m ou plus recommandé |
| Erreurs aléatoires dans la détermination de la distance(1σ) | <2cm@20m (réflectivité 80%) |
| Erreur du système de télémétrie | <±3cm@20m |
| champ de vision | 120° horizontal, 25° vertical |
| erreur aléatoire angulaire | <0.1° |
| Sortie du nuage de points | 452 000 points/seconde |
| Température de l'environnement de travail | -40℃~85℃ |
| Niveau de protection radar | IP66 |
| Consommation d'énergie en fonctionnement | Puissance nominale 12W ; Démarrage 26W ; Puissance maximale de chauffage à basse température 40W ; Tension d'alimentation : 9~18V |
| Logiciel de traitement des données | Processeur de données en ligne intégré au système |
| Paramètres mesurables | Données de nuages de points 3D, hauteur de la canopée (hauteur moyenne et hauteur du quartile 80%), surface de la végétation, couverture, indice de surface foliaire, diamètre du tronc à hauteur de poitrine (monté latéralement), angle d'inclinaison des feuilles. |
| mode de fonctionnement | Entièrement automatique, tout temps |
| transmission sans fil | Module intégré, supportant la carte à double flux, remplaçable à chaud, communication réseau 4G complète |
| apporter son propre matérielGPS | Enregistrement des informations relatives à l'élévation de la position et étalonnage de l'heure du système |