XST-LiDARNet In-situ eco-lidar
Products

The XST-LiDARNet in-situ ecological LiDAR system independently developed by Beijing StarView Technology Co., Ltd. can continuously scan the target area in the field ecological environment, more accurately reflect the dynamics of the vegetation, maintain the observation continuity, with a time resolution of up to hourly, and in-situ observation of the data, without having to take into account the geometrical positional alignment problem of the point cloud, and effectively utilize the temporal information, accurately capturing the changes in the growth of the vegetation.
software system
Raw data:Binary structured data is a 3D point cloud map consisting of a series of XYZ coordinate information;
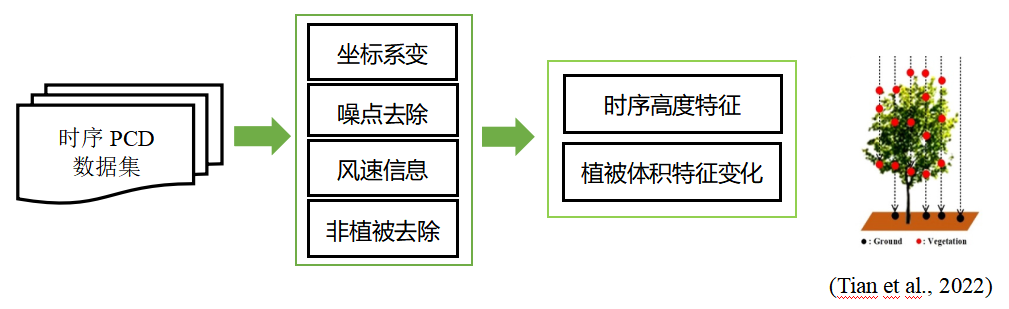
Point cloud data processing:Processes such as 3D coordinate transformation, noise point removal, intraday point cloud data synthesis, point cloud ground filtering, wind speed filtering, etc., combined with human judgment filtering (e.g., tower, bracket base, etc., can be manually cropped at once during installation);
Optimization of structural parameter extraction algorithms:Optimal rasterized canopy height extraction model; Estimating the daily change of vegetation volume based on volumetric surface differencing and obtaining vegetation temporal change characteristics.
Application Cases
Combination of LiDAR and weathering camera to observe growth and weathering while providing reference for point cloud data calculation and validation.

Data processing
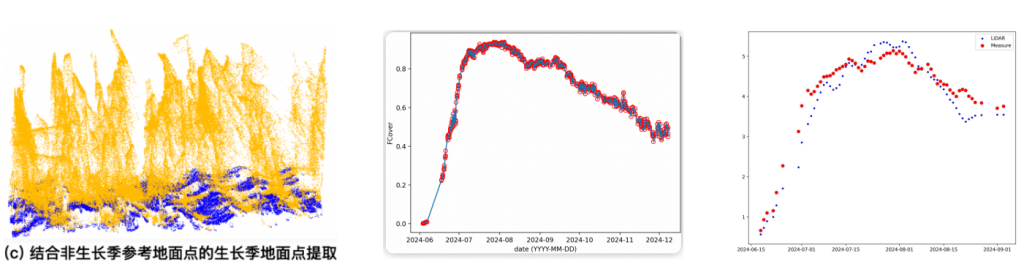
Point cloud separation of crops from the ground - Vegetation cover calculation (FVC) - Gap rate calculation - Leaf area index calculation (LAI). With data acquired over one growing season, the leaf area index obtained from LiDAR calculations was very consistent with the time series pattern of ground-truth values (7-day sliding average).
Technical Parameters
| laser wavelength | 905nm |
| human eye safety level | Class 1 (IEC 60825-1:2014) |
| Measuring range(@100klx) | 150m @10% reflectance; minimum range 1m, 3m or more recommended |
| Random errors in ranging(1σ) | <2cm@20m (80% reflectance) |
| Ranging system error | <±3cm@20m |
| field of view | 120° horizontal, 25° vertical |
| angular random error | <0.1° |
| Point cloud output | 452,000 points/second |
| Operating Temperature | -40℃~85℃ |
| Radar protection level | IP66 |
| Running Power Consumption | Rated 12W; Start 26W; Maximum low-temperature heating power 40W; Supply voltage: 9~18V |
| Data processing software | Built-in online data processing program |
| Measurable parameters | 3D point cloud data, canopy height (mean height and 80% quartile height), vegetation area, cover, leaf area index, trunk diameter at breast height (mounted laterally), leaf inclination angle |
| operating mode | Fully automatic, all-weather |
| wireless transmission | Built-in module, support dual-flow card, hot-swappable, 4G full network communication |
| bring one's ownGPS | Records position elevation information and calibrates system time |