XST-LiDARNet In-situ-Öko-Lidar
Produkte

Das von Beijing StarView Technology Co., Ltd. unabhängig entwickelte ökologische In-situ-LiDAR-System XST-LiDARNet kann das Zielgebiet in der ökologischen Umgebung vor Ort kontinuierlich scannen, die Dynamik der Vegetation genauer wiedergeben, die Beobachtungskontinuität aufrechterhalten, mit einer zeitlichen Auflösung von bis zu einer Stunde, und die Daten können in-situ beobachtet werden, ohne die geometrische Positionsausrichtung der Punktwolke zu berücksichtigen, wobei die zeitlichen Informationen effektiv genutzt werden und die Veränderungen des Wachstums der Vegetation genau erfasst werden.
Software-System
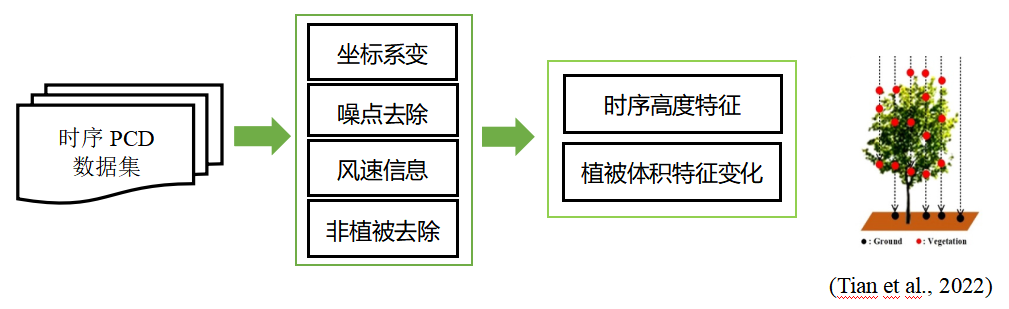
Rohdaten:Binär strukturierte Daten sind eine 3D-Punktwolkenkarte, die aus einer Reihe von XYZ-Koordinateninformationen besteht;
Verarbeitung von Punktwolkendaten:Prozesse wie 3D-Koordinatentransformation, Rauschpunktentfernung, Intraday-Punktwolkendaten-Synthese, Punktwolken-Bodenfilterung, Windgeschwindigkeitsfilterung usw., kombiniert mit der Filterung nach menschlichem Ermessen (z. B. Turm, Auslegerfuß usw. können während der Installation auf einmal manuell geschnitten werden);
Optimierung von Algorithmen zur Extraktion von Strukturparametern:Optimales gerastertes Modell zur Extraktion der Baumkronenhöhe; Schätzung der täglichen Veränderungen des Vegetationsvolumens auf der Grundlage der volumetrischen Oberflächendifferenzierung zur Ermittlung der Merkmale der zeitlichen Veränderungen der Vegetation.
Anwendungsfälle
Die Kombination aus LiDAR und einer Wetterkamera bietet eine Referenz für die Berechnung und Validierung von Punktwolkendaten, während das Wachstum und das Wetter beobachtet werden.

Datenverarbeitung
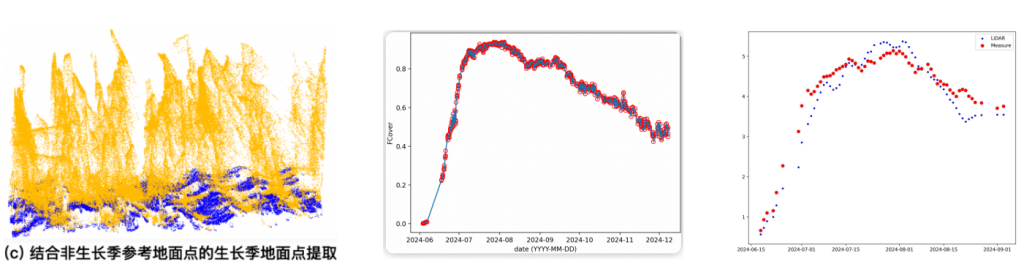
Punktwolkentrennung der Pflanzen vom Boden - Berechnung der Vegetationsbedeckung (FVC) - Berechnung der Lückenrate - Berechnung des Blattflächenindex (LAI). Bei den über eine Vegetationsperiode erfassten Daten stimmte der aus den LiDAR-Berechnungen gewonnene Blattflächenindex sehr gut mit dem Zeitreihenmuster der Bodenwerte überein (gleitender 7-Tage-Durchschnitt).
Technische Parameter
| Laser-Wellenlänge | 905nm |
| Sicherheitsstufe für das menschliche Auge | Klasse 1 (IEC60825-1:2014) |
| Messbereich(@100klx) | 150m @10% Reflektivität; Mindestreichweite 1m, 3m oder mehr empfohlen |
| Zufällige Fehler bei der Entfernungsmessung(1σ) | <2cm@20m (80% Reflexionsvermögen) |
| Fehler im Entfernungsmesssystem | <±3cm@20m |
| Sichtfeld | 120° horizontal, 25° vertikal |
| zufälliger Winkelfehler | <0.1° |
| Ausgabe der Punktwolke | 452.000 Punkte/Sekunde |
| Temperatur der Arbeitsumgebung | -40℃~85℃ |
| Schutzniveau des Radars | IP66 |
| Laufende Leistungsaufnahme | Nennleistung 12 W; Startleistung 26 W; maximale Heizleistung bei niedrigen Temperaturen 40 W; Versorgungsspannung: 9~18 V |
| Software für die Datenverarbeitung | Integrierter Online-Datenprozessor im System |
| Messbare Parameter | 3D-Punktwolkendaten, Höhe des Kronendachs (mittlere Höhe und 80%-Quartilhöhe), Vegetationsfläche, Deckung, Blattflächenindex, Stammdurchmesser in Brusthöhe (seitlich angebracht), Blattneigungswinkel |
| Betriebsart | Vollautomatisch, allwettertauglich |
| drahtlose Übertragung | Eingebautes Modul, unterstützt Dual-Flow-Karte, Hot-Swap-fähig, 4G-Vollnetzkommunikation |
| die eigenen mitbringenGPS | Aufzeichnung von Informationen zur Positionserhöhung und Kalibrierung der Systemzeit |